 官方微信
官方微信
本指南将详解该技术的工作原理,并指导您熟练上手使用。
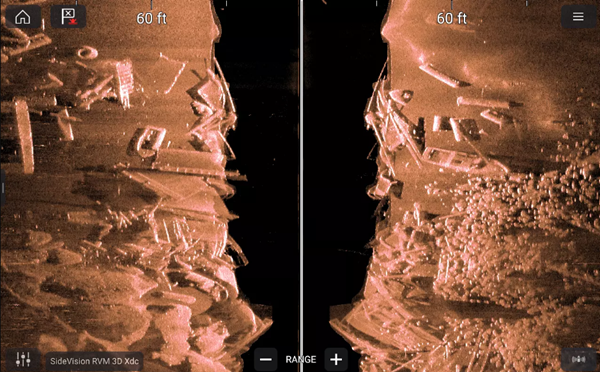
我们在社交平台发布的一张侧扫成像截图,迅速吸引了众多垂钓爱好者,也引出了两个热门问题:这是哪款声呐技术?如何让自己的声呐也呈现出这样的画面?
上图画面取自Axiom 2 Pro RVM搭载的CHIRP侧扫声呐。这款广域探测声呐可向船体两侧水平扫描,清晰呈现水下布局、地形起伏与阴影轮廓。它与CHIRP下扫声呐相辅相成,后者负责扫描船底正下方水域,识别水底材质、地表纹理,同时还原回波信号的纵向分布状态。
侧扫声呐工作原理
理解侧扫声呐最简单的方式,想象用手电筒在漆黑的房间里来回扫动即可。
船体向外发射出宽大的扇形声呐波束。当波束遇到凸起物、碎石堆、船体、桩柱等物体时,部分声波能量会反弹回换能器,其余则被物体遮挡。
物体后方形成的静音区,在显示屏上就会呈现为深色阴影。
阴影修长且轮廓规整:代表凸起较高的物体,如驳船船体、高大碎石堆
阴影偏短:代表低矮地形 / 物体
阴影边缘清晰锐利:对应钢材、混凝土、岩石等硬质材质
阴影边缘模糊柔和:对应水草、水生植物等软性附着物
只要吃透波束 — 物体 — 阴影的对应规律,声呐画面看起来就和照片一样直观,水下地形高度、材质与整体布局都能一目了然。

目标识别:简易通用操作方法
Raymarine声呐及渔探系统全球产品经理布雷登・舒梅克在佛罗里达州长大,自打学会走路没多久,他便开始执竿垂钓。毋庸置疑,他在渔探仪声呐画面的采集与解读方面经验十分丰富。针对水下硬质障碍物密集的区域,布雷登推荐一套简单且可反复套用的侧扫成像 + 下扫成像操作流程:
全域测绘(侧扫成像,单侧探测距离约 60–100 英尺):先拉大探测范围,识别碎石堆、船体、框架、涵洞等大型水下构造,以及代表高凸起地形的长条阴影。
精细扫描(侧扫成像,单侧探测距离约 40 英尺):调转航向再次扫描。多角度交叉探测,能发现单一航向下容易遗漏的空洞、边界与悬垂结构。
目标核验(下扫成像):驾驶船只从目标正上方驶过,区分岩石与金属构架、判别地表纹理,同时观察鱼群回波在构造周边的分布情况。
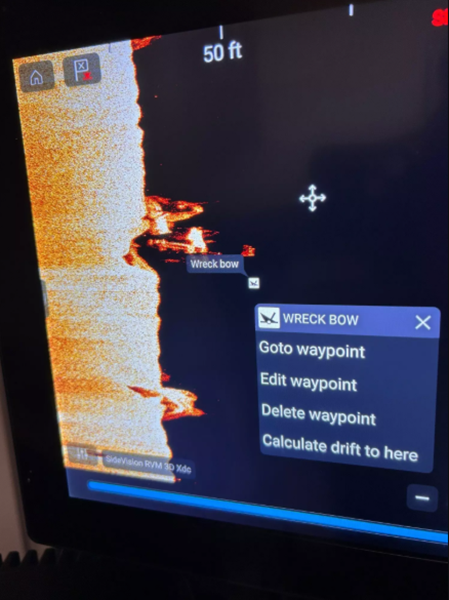
标记关键点位:在构造边缘、阴影末端设置航点,后续返航时,海图便能清晰还原水下地貌。
Axiom 2 Pro RVM声呐调节技巧
Axiom设备的侧扫成像声呐无需手动精细调节频率,设备会自动启用高分辨率调频脉冲频段(320-380 千赫)。重点只需调整影响画面清晰度与阴影对比度的相关参数。
探测距离:
单侧 60 英尺:用于探查整体地貌
单侧 40 英尺:用于细化观测细节
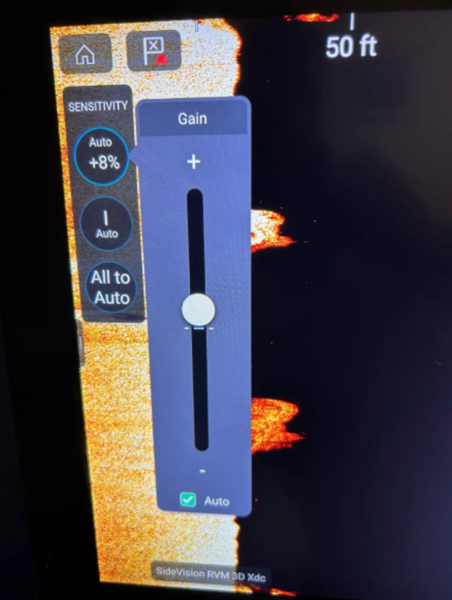
增益(手动调节 约 58%–65%):
逐步调高增益,直至画面出现微弱杂点,再小幅调低。以画面轮廓清晰明亮、无多余噪点为佳。
强度(55%–62%):
该参数用于调控色彩分布区间,主要决定最强、最硬回波的白色显色范围。小幅调高可让硬质轮廓更锐利,同时保证阴影深邃、辨识度高;但数值过高会造成画面泛白,丢失关键细节。调节目标:兼顾清晰的硬质回波、分明的水底沉积物以及强烈的阴影反差,呈现最优观测画面。
水面滤波:
该功能仅作用于下扫成像通道,可削弱水面附近船行尾流气泡、漂浮杂物、泥沙等产生的干扰噪点。快速航行扫测水域时,使用自动滤波即可;而在地形起伏较大的区域,手动调节能让画面细节表现更稳定。
常规环境(浅水区、地形起伏大):10%–20%,保持低滤波强度
存在船行尾流、水面波纹或浅层杂波带:25%–35%
风浪较大水域:最高调至 40%–45%(会损失部分细微画面细节)
航速
航速是保障侧扫、下扫成像画面清晰的关键。保持2–4 节的稳定航速,能让轮廓分明、阴影形态规整。航速过慢会导致物体影像拉伸变形;航速过快则会丢失细节、降低画质。航速骤变也会扭曲目标外形,因此匀速行驶才能获得精准、易辨识的声呐回波。
探测航线规划
条件允许时,至少从两个不同航向横穿每一处大型水下构造,并在构造边缘与阴影末端标记航点。这些位置是回访时极具参考价值的点位,掠食性鱼类常会在此潜伏,伺机捕食小型饵鱼。
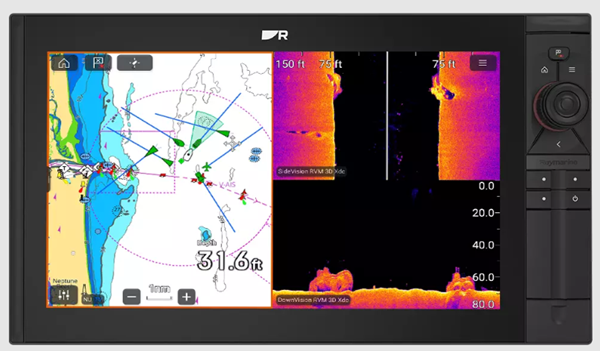
善用海图功能
将Axiom的声呐功能与机身内置海图搭配使用,探鱼效率将大幅提升。你不仅能对照海图水底地形,确认船只所处位置,还可手动添加航点,标记各类重点目标。声呐画面中标记的航点会同步显示在海图上,方便精准对应声呐探测到的水下构造,与海图水深测点、等高线之间的位置关系。
若海图支持水深着色功能,可开启该选项,突出暗礁的有效水深区域,让适宜垂钓的水域一目了然。你还能根据侧扫成像标记的点位规划简易航线,以3 至 4 节的常规成像航速沿航线航行,也可启用自动驾驶仪或拖钓马达自动循线行驶。
借助海图仪的轨迹记录功能,可查看过往航行区域,便于重复开展有效探测。此外,建议为航点命名并区分颜色,让分布规律更直观,下次出航时也能快速接续此前的探测工作。
通用实战流程
无论你垂钓的区域是人工鱼礁、码头缆区、防波堤边缘还是桥基碎石堆,整套操作方法都完全通用:
先用侧视成像大范围扫描 → 收窄探测距离 → 变换多个航向交叉探测 → 借助下视成像核验目标 → 在构造边缘与阴影末端保存航点。
熟练掌握这套步骤,你就能更从容地解读渔探仪画面、更快识别水下构造,让每一次航行探测都收获满满。




